Wireless ESP01s payload drop servo works reliably from lipo
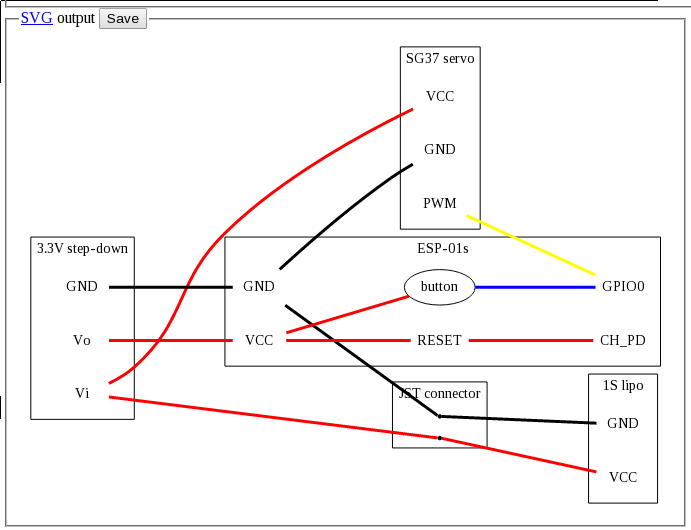
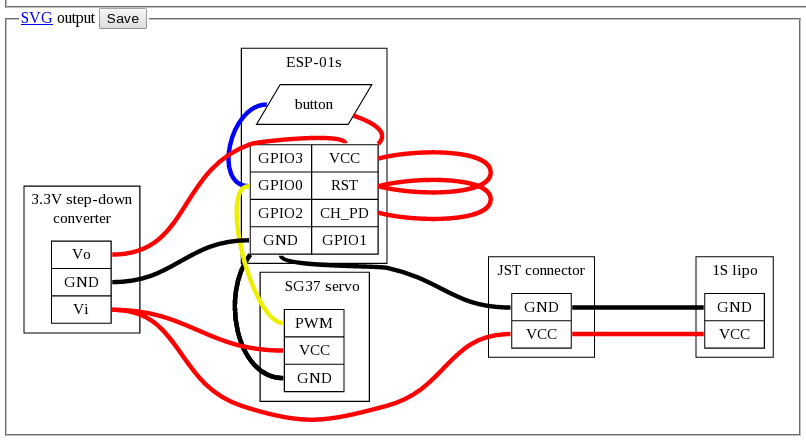
This is first video of work-in-progress lightweight servo bom drop mechanism. The ESP-01s running MicroPython, SG37 servo, 150mAh 25C lipo and 3.3V step-down converter as shown (14.6g sofar) will be attached to Eachine E52 drone (86.5g). The enabled WebREPL will be accessed from mobile Raspberry Pi ZeroW via webrepl_client.py providing remote Micropython shell on ground. "payload" module will have two functions, lock() and drop():
https://forum.micropython.org/viewtopic ... 180#p29865
I had to connect servo VCC to lipo VCC. While the 3.8V-4.2V from lipo are still outside of servo operating range 4.8V-6.0V, this setup works reliably. Because servo connector is connected to ESP-01s GND and GPIO-0 pins, GPIO-0 is low on power on. I had to solder small switch connecting GPIO-0 and VCC to avoid running ESP-01s into flash mode. For details see attached 8MP photo of the scene.
https://forum.micropython.org/viewtopic ... 180#p29865
I had to connect servo VCC to lipo VCC. While the 3.8V-4.2V from lipo are still outside of servo operating range 4.8V-6.0V, this setup works reliably. Because servo connector is connected to ESP-01s GND and GPIO-0 pins, GPIO-0 is low on power on. I had to solder small switch connecting GPIO-0 and VCC to avoid running ESP-01s into flash mode. For details see attached 8MP photo of the scene.