- Fri Jun 12, 2015 11:42 am
#20278
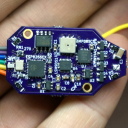
Though I have done some initial motor testing, and I'm having some reliability problems when motors are going... aaaand haven't finished an actual control loop, I have made a pretty good stab at making my esp8266-driven quadcopter, complete with LSM9DS1 IMU, a barometer and an AVR motor driver, ADC, etc.
I'm also working more and more on my generic ESP8266 stack which includes net flashing (like the OTA upgrades, but using the legacy memory map which I prefer) UDP + HTTP command interface, generic HTTP server, bit-banged I2C engine, and a few other tidbits here and there.
I've got a picture of what I have so far and an extensive readme (And code) here:
https://github.com/cnlohr/wiflier/
I'm up for getting feedback, though some of the things I think I am gonna stick with for the time being are:
(1) GCC
(2) The official esp_iot_sdk.
(3) Actually using C, instead of trying to build it on some other framework.
I'm also working more and more on my generic ESP8266 stack which includes net flashing (like the OTA upgrades, but using the legacy memory map which I prefer) UDP + HTTP command interface, generic HTTP server, bit-banged I2C engine, and a few other tidbits here and there.
I've got a picture of what I have so far and an extensive readme (And code) here:
https://github.com/cnlohr/wiflier/
I'm up for getting feedback, though some of the things I think I am gonna stick with for the time being are:
(1) GCC
(2) The official esp_iot_sdk.
(3) Actually using C, instead of trying to build it on some other framework.






