- Thu Jun 18, 2015 5:04 pm
#20854
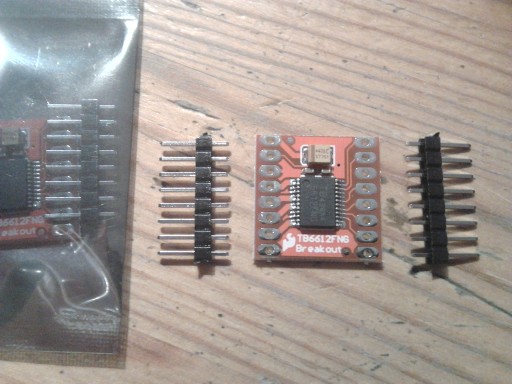
Only 21 days after ordering two "Dual Motor Driver 1A TB6612FNG" arrived today!
After some searching I found them for only 2.70$ (with free shipping to Germany) per pcs on Aliexpress.
The main reason I bought them in addition to L293D I already have is that logic voltage input range is 2.7-5.5V.
That allows to use these pieces directly with ESP8266 3.3V chips, and still being able to drive two 15V motors (@1.2A / 3.2A peak).
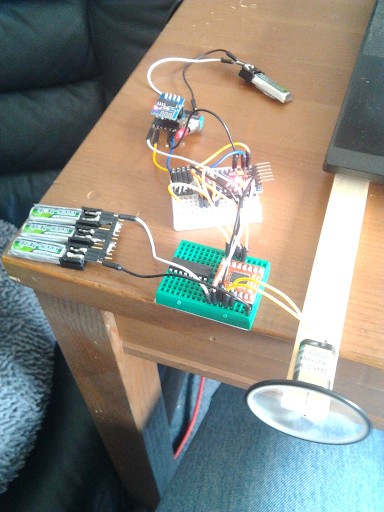
So it seems that I can now eliminate the LD33V and Logic Level Converter by replacing L293D with TB6612FNG in above Fritzing diagram.

Hermann.
After some searching I found them for only 2.70$ (with free shipping to Germany) per pcs on Aliexpress.
The main reason I bought them in addition to L293D I already have is that logic voltage input range is 2.7-5.5V.
That allows to use these pieces directly with ESP8266 3.3V chips, and still being able to drive two 15V motors (@1.2A / 3.2A peak).
So it seems that I can now eliminate the LD33V and Logic Level Converter by replacing L293D with TB6612FNG in above Fritzing diagram.
Hermann.