
- Wed Jun 10, 2015 12:22 pm
#20068
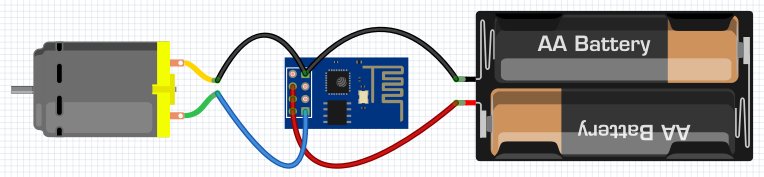
I know that direct ESP8266-01 motor control is not good, will use motor controller soon.
The telnet server on port 2323 gets setup in "init.lua" (see here for details).
ESP8266-01 acts as access point on 192.168.4.1.
Was able to kick Arduino out of the equation (see this forum posting).
The video was done with cell phone camera in left hand and right hand typing (you can hear the typing).
This is copied in youtube video text:
Below commands used for the video.
* initiating restart of ESP8266-01
* wait for ESP8266-01 access point by ping
* telnet into NodeMCU running on ESP8266-01
* setting pin no. 9 (RX) to output mode
* setting pin to HIGH (turns motor on at 3.3V)
* setting pin to LOW (turns off motor)
> node.restart()
^]quit
telnet> quit
Connection closed.
$ ping 192.168.4.1
PING 192.168.4.1 (192.168.4.1) 56(84) bytes of data.
64 bytes from 192.168.4.1: icmp_seq=6 ttl=255 time=32.8 ms
64 bytes from 192.168.4.1: icmp_seq=7 ttl=255 time=90.5 ms
^C
--- 192.168.4.1 ping statistics ---
7 packets transmitted, 2 received, 71% packet loss, time 6271ms
rtt min/avg/max/mdev = 32.860/61.717/90.575/28.858 ms
$ telnet 192.168.4.1 2323
Trying 192.168.4.1...
Connected to 192.168.4.1.
Escape character is '^]'.
Welcome to NodeMCU world.
> gpio.mode(9,1)
> gpio.write(9,1)
> gpio.write(9,0)
>
(had to use ">" double width character in youtube video description because brackets ">" are not allowed)
Hermann.
I know that direct ESP8266-01 motor control is not good, will use motor controller soon.
The telnet server on port 2323 gets setup in "init.lua" (see here for details).
ESP8266-01 acts as access point on 192.168.4.1.
Was able to kick Arduino out of the equation (see this forum posting).
The video was done with cell phone camera in left hand and right hand typing (you can hear the typing).
This is copied in youtube video text:
Below commands used for the video.
* initiating restart of ESP8266-01
* wait for ESP8266-01 access point by ping
* telnet into NodeMCU running on ESP8266-01
* setting pin no. 9 (RX) to output mode
* setting pin to HIGH (turns motor on at 3.3V)
* setting pin to LOW (turns off motor)
> node.restart()
^]quit
telnet> quit
Connection closed.
$ ping 192.168.4.1
PING 192.168.4.1 (192.168.4.1) 56(84) bytes of data.
64 bytes from 192.168.4.1: icmp_seq=6 ttl=255 time=32.8 ms
64 bytes from 192.168.4.1: icmp_seq=7 ttl=255 time=90.5 ms
^C
--- 192.168.4.1 ping statistics ---
7 packets transmitted, 2 received, 71% packet loss, time 6271ms
rtt min/avg/max/mdev = 32.860/61.717/90.575/28.858 ms
$ telnet 192.168.4.1 2323
Trying 192.168.4.1...
Connected to 192.168.4.1.
Escape character is '^]'.
Welcome to NodeMCU world.
> gpio.mode(9,1)
> gpio.write(9,1)
> gpio.write(9,0)
>
(had to use ">" double width character in youtube video description because brackets ">" are not allowed)
Hermann.



