
- Fri Oct 12, 2018 8:57 pm
#78604
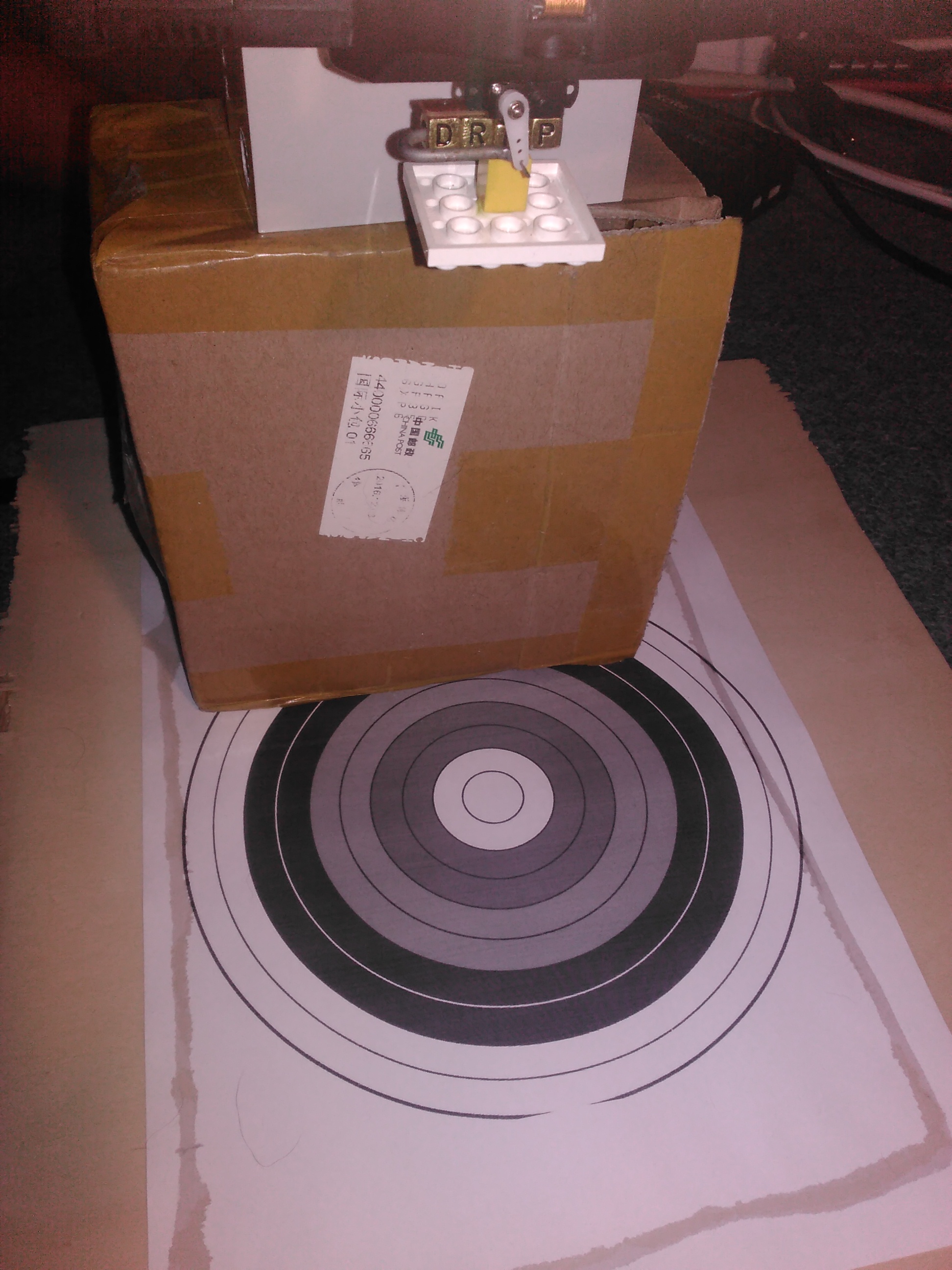
OK, now I did 1st drop onto target, remote from laptop instead of ESP01s attached to transmitter.
This is setup, payload 17.5cm above ground, you can see black SG17 servo as part of drop mechanism.
Superglued to bottom front of drone, near vertical direction drone camera in front:
This is same scene, 1280x960 photo from drone camera:

I did take a video and was surprised to see that this 2nd of my drones in fact has only 0.3MP camera (640x480@30fps). My first same E52 model drone has 0.4MP 720x576@25fps camera. Then I converted the video to same speed animation (adding context images):
https://www.youtube.com/watch?v=Iz0sDljiWX8&feature=youtu.be
What is wrong:
The camera is positioned exactly above center of target.
Because that is displayed near bottom, camera currently does not look perfectly vertical.
I was not sure whether payload would not cover too much of camera view.
It does not, good that it can be seen a little at bottom of view.
P.S:
Counting frames by single stepping youtube video, from 1st move of payload until touchdown, gives 13 frames.
Therefore it takes 13/30=0.43s.
Free fall formula for 17.5cm says it takes 0.19s.
From previous posting we know that O-cube is free to move vertical after 67ms.
Therfore it takes 0.43-0.19-0.067=0.173s until O-cube is out between R and P cubes for free fall.
This is setup, payload 17.5cm above ground, you can see black SG17 servo as part of drop mechanism.
Superglued to bottom front of drone, near vertical direction drone camera in front:
This is same scene, 1280x960 photo from drone camera:
I did take a video and was surprised to see that this 2nd of my drones in fact has only 0.3MP camera (640x480@30fps). My first same E52 model drone has 0.4MP 720x576@25fps camera. Then I converted the video to same speed animation (adding context images):
https://www.youtube.com/watch?v=Iz0sDljiWX8&feature=youtu.be
What is wrong:
The camera is positioned exactly above center of target.
Because that is displayed near bottom, camera currently does not look perfectly vertical.
I was not sure whether payload would not cover too much of camera view.
It does not, good that it can be seen a little at bottom of view.
P.S:
Counting frames by single stepping youtube video, from 1st move of payload until touchdown, gives 13 frames.
Therefore it takes 13/30=0.43s.
Free fall formula for 17.5cm says it takes 0.19s.
From previous posting we know that O-cube is free to move vertical after 67ms.
Therfore it takes 0.43-0.19-0.067=0.173s until O-cube is out between R and P cubes for free fall.



